· Eduardo Vieira · Industrial AI · 2 min de lectura
Visión Artificial en el Borde: Guía Práctica de Implementación Industrial
Detectar defectos es fácil en Python. Lo difícil es decirle al PLC que rechace la pieza en 50ms. Guía con YOLOv11, Hailo-8 y Modbus TCP.

El problema de la “Inteligencia Artificial” en la industria es que el 99% de los tutoriales terminan cuando aparece el cuadro verde alrededor del gato en la pantalla.
En una planta real, eso no sirve de nada. Si no le avisas al PLC que rechace la pieza, solo tienes un televisor caro.
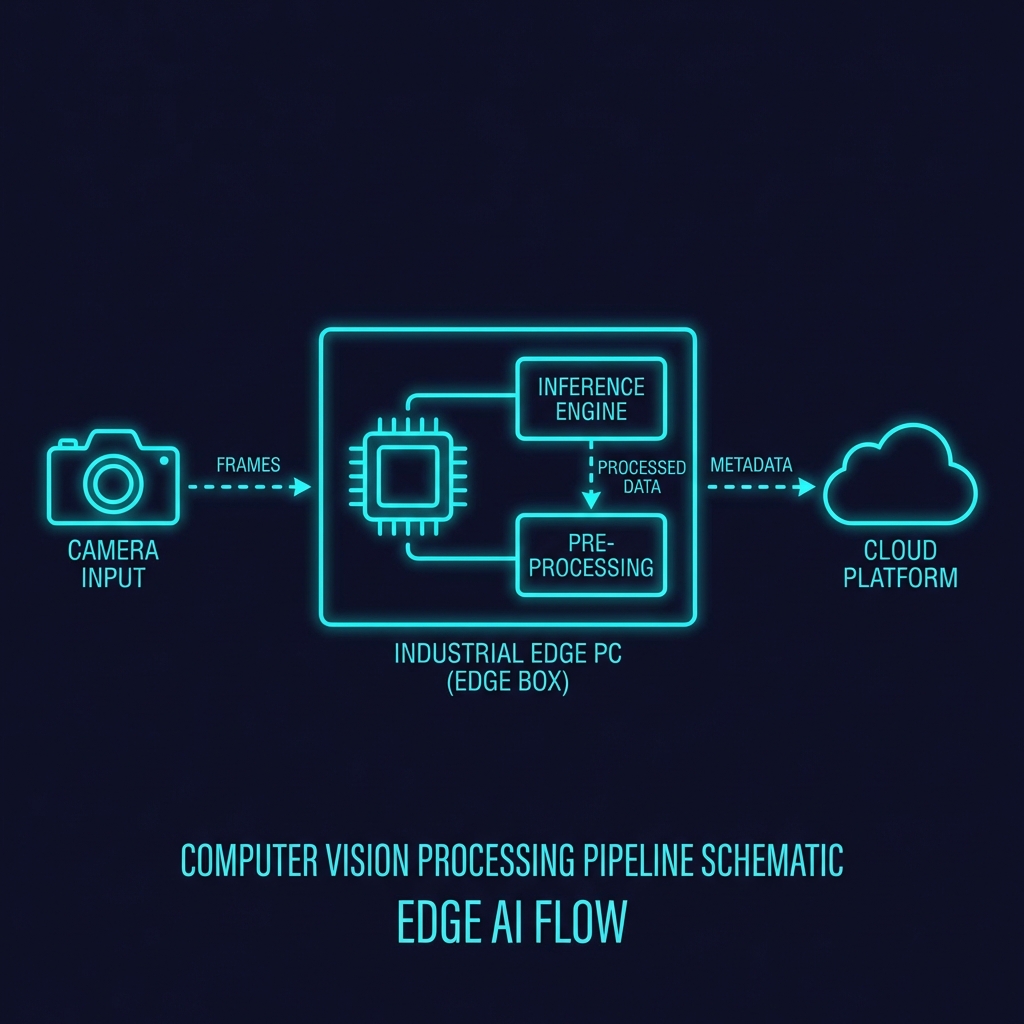
Esta guía cubre el eslabón perdido: cómo llevar modelos modernos (YOLOv11) a hardware robusto y cerrar el lazo de control.
1. El Hardware: Necesitas un Acelerador
Un Raspberry Pi 5 a pelo corre YOLO a 2-3 FPS. Insuficiente para una línea de producción. Necesitas una NPU (Neural Processing Unit).
- Hailo-8: El rey actual del rendimiento/vatio. 26 TOPS. Puede correr múltiples streams HD en tiempo real.
- Google Coral (TPU): Viejo confiable, pero se está quedando corto frente a modelos nuevos.
- Nvidia Jetson Orin: La bestia. Úsalo si necesitas CUDA puro, pero prepárate para pagar 10 veces más.
Recomendación 2025: RPi 5 + Hailo-8L (vía M.2 HAT). Costo total < $150 USD.
2. El Modelo: YOLOv11
Ultralytics acaba de lanzar YOLOv11. Es más ligero y preciso que v8. No entrenes desde cero. Usa Transfer Learning.
- Toma 100 fotos de TUS piezas defectuosas.
- Etiquétalas con CVAT o Roboflow.
- Re-entrena el modelo base
yolo11n.pt(nano) por 50 épocas.
3. El Eslabón Perdido: La Integración OT
Aquí es donde fallan los científicos de datos. ¿Cómo le dices al PLC “rechazo”?
Opción A: GPIO (Rápido y Sucio)
Cablear un pin del RPi a una entrada del PLC.
- Pros: Latencia < 1ms.
- Contras: Ruido eléctrico, solo transmite 1 bit (SI/NO).
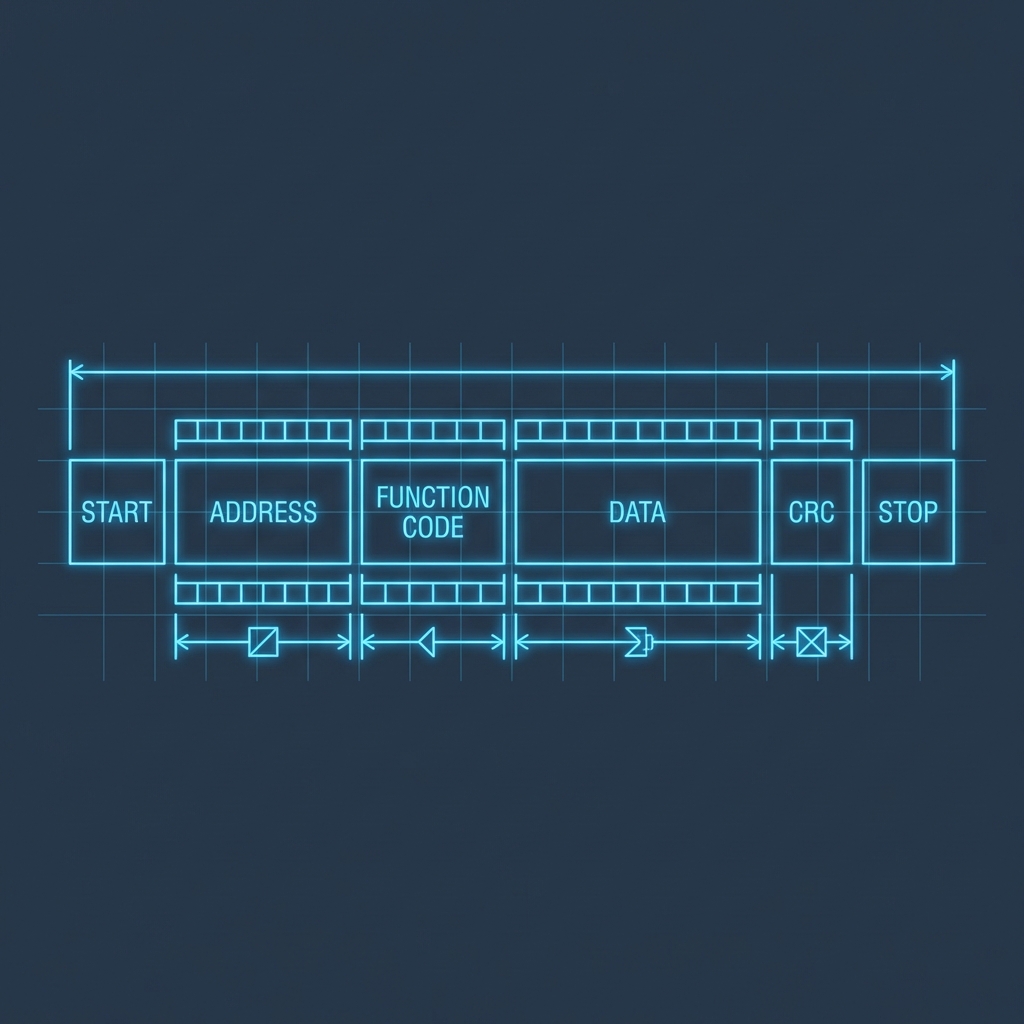
Opción B: Modbus TCP (Estándar)
Levanta un servidor Modbus en Python (pymodbus). Cuando detectes defecto:
# Pseudo-código de inferencia
results = model(frame)
if user_conf > 0.85:
# Escribir en Registro 40001 del PLC
client.write_register(1, 1, unit=1)
# Opcional: Escribir coordenadas X,Y para que un robot lo agarre
client.write_register(2, int(box.x), unit=1)4. Latencia y Determinismo
El PLC espera una respuesta en tiempo fijo. Si tu red neuronal tarda 200ms a veces y 50ms otras, el PLC se va a desincronizar.
- Usa GStreamer para capturar video sin buffer.
- Asegura que tu inferencia + comunicación sea menor al “Takt Time” de la máquina.
Conclusión
La IA en el borde ya no es ciencia ficción. Con un RPi 5 y un Hailo-8, tienes un sistema de visión que compite con cámaras inteligentes de $5000 USD, pero solo si respetas las reglas del juego industrial: robustez, determinismo y protocolos estándar.