· Eduardo Vieira · Industrial AI · 2 min read
Computer Vision at the Edge: Practical Industrial Implementation Guide
Detecting defects in Python is easy. Telling the PLC to reject the part in 50ms is hard. Guide with YOLOv11, Hailo-8, and Modbus TCP.

The problem with “Artificial Intelligence” in the industry is that 99% of tutorials end when the green box appears around the cat on the screen.
In a real plant, that is useless. If you don’t tell the PLC to reject the part, you just have an expensive TV.
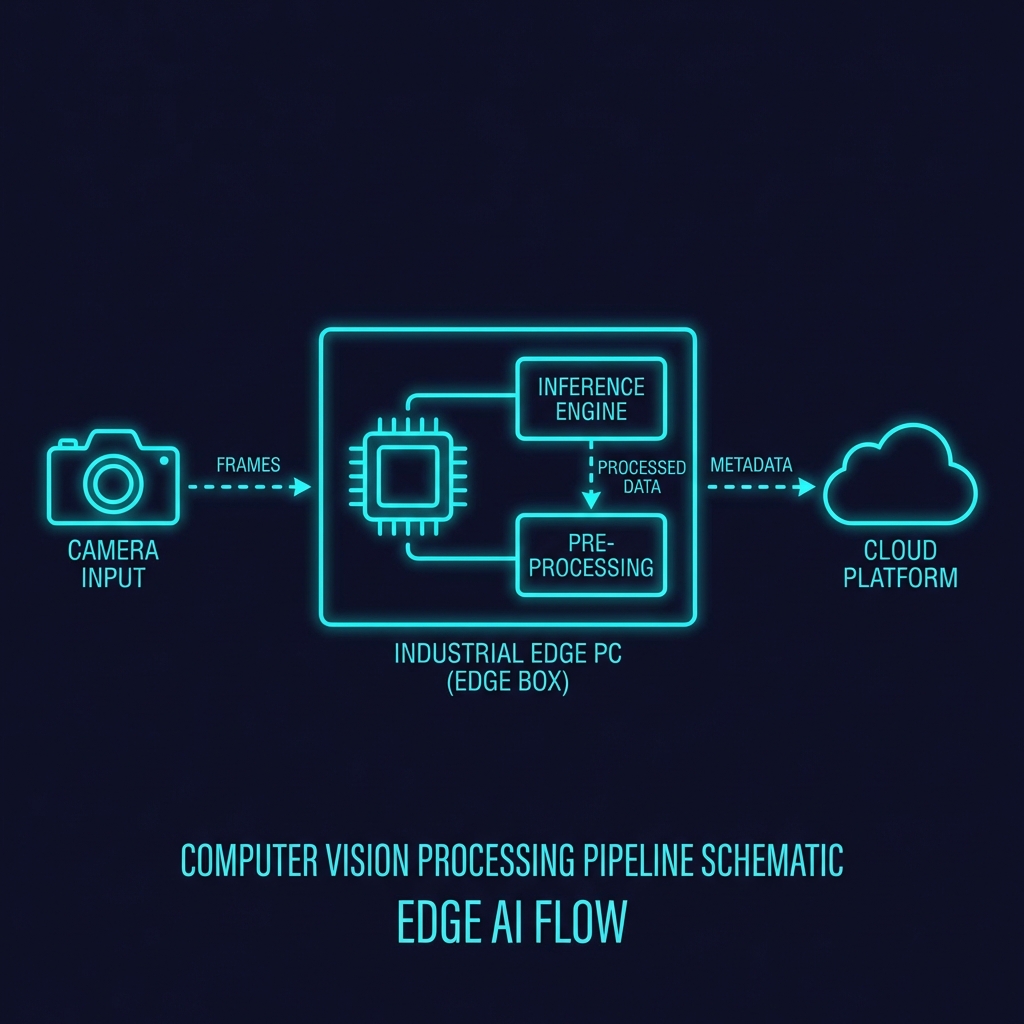
This guide covers the missing link: how to take modern models (YOLOv11) to robust hardware and close the control loop.
1. The Hardware: You Need an Accelerator
A raw Raspberry Pi 5 runs YOLO at 2-3 FPS. Insufficient for a production line. You need an NPU (Neural Processing Unit).
- Hailo-8: The current king of performance/watt. 26 TOPS. Can run multiple HD streams in real-time.
- Google Coral (TPU): Old reliable, but falling short against newer models.
- Nvidia Jetson Orin: The beast. Use if you need pure CUDA, but prepare to pay 10x more.
2025 Recommendation: RPi 5 + Hailo-8L (via M.2 HAT). Total cost < $150 USD.
2. The Model: YOLOv11
Ultralytics just released YOLOv11. It’s lighter and more accurate than v8. Don’t train from scratch. Use Transfer Learning.
- Take 100 photos of YOUR defective parts.
- Label them with CVAT or Roboflow.
- Re-train the base
yolo11n.pt(nano) model for 50 epochs.
3. The Missing Link: OT Integration
This is where data scientists fail. How do you tell the PLC “reject”?
Option A: GPIO (Quick and Dirty)
Wire an RPi pin to a PLC input.
- Pros: Latency < 1ms.
- Cons: Electrical noise, can only transmit 1 bit (YES/NO).
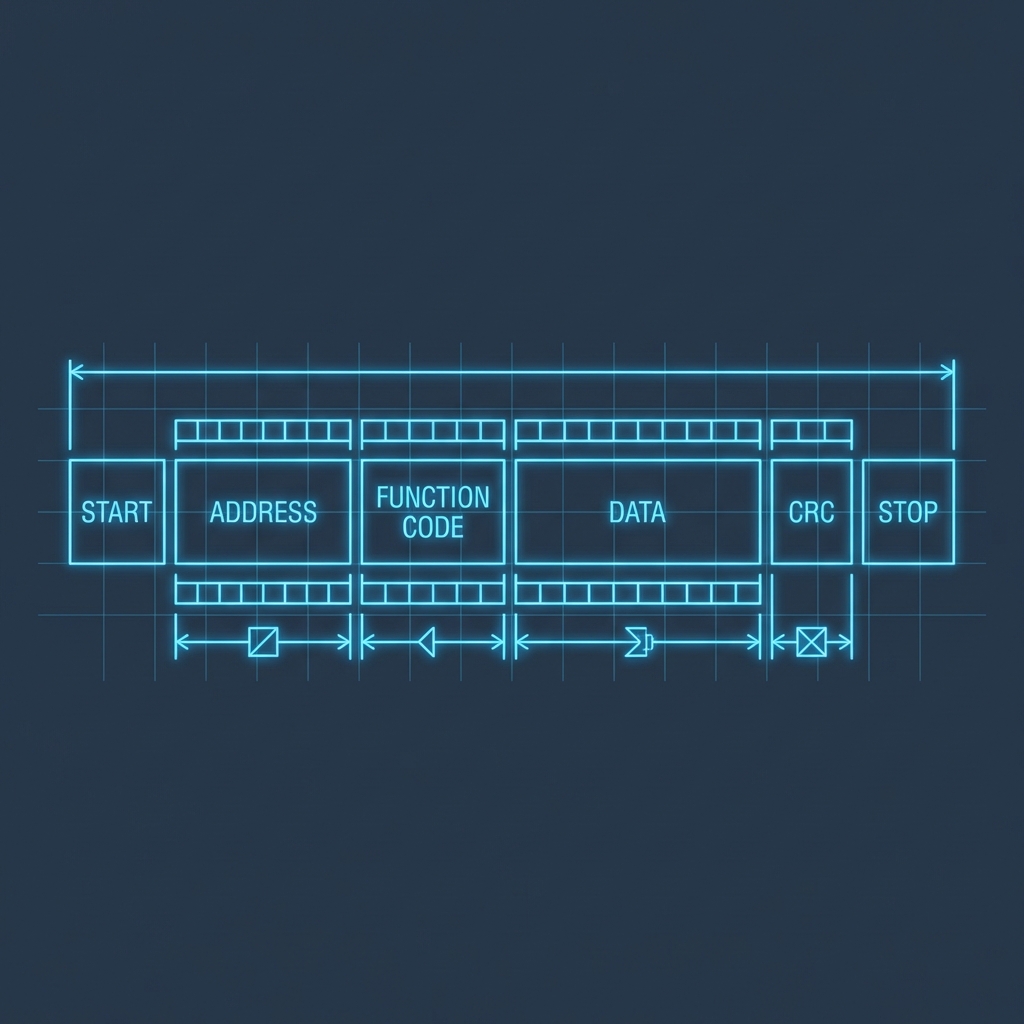
Option B: Modbus TCP (Standard)
Spin up a Modbus client in Python (pymodbus). When defect detected:
# Inference Pseudo-code
results = model(frame)
if user_conf > 0.85:
# Write to PLC Register 40001
client.write_register(1, 1, unit=1)
# Optional: Write X,Y coordinates for a robot to grab it
client.write_register(2, int(box.x), unit=1)4. Latency and Determinism
The PLC expects a response in fixed time. If your neural net takes 200ms sometimes and 50ms others, the PLC will de-synchronize.
- Use GStreamer to capture video without buffering.
- Ensure your inference + communication time is less than the machine’s “Takt Time”.
Conclusion
Edge AI is no longer science fiction. With an RPi 5 and a Hailo-8, you have a vision system that competes with $5000 USD smart cameras, but only if you play by industrial rules: robustness, determinism, and standard protocols.